LA Modul 3 (Mikro)
- Siapkan alat alat yang diperlukan pada rangkaian
- Hubungkan setiap komponen
- Inputkan Listing Program
- Running
2. Hardware dan Diagram Blok [Kembali]
Hardware yang digunakan dalam rangkaian ini meliputi:
- Raspberry Pi Pico – Sebagai mikrokontroler utama untuk mengendalikan sistem.

- Servo
- Potensiometer


- LCD

3. Rangkaian Simulasi dan Prinsip Kerja[Kembali]

Prinsip Kerja:
-
Pembacaan Potensiometer (GP26):
-
Potensiometer yang dihubungkan ke pin ADC (Analog-to-Digital Converter) pada Raspberry Pi Pico membaca nilai resistansi.
-
Nilai resistansi ini dikonversi ke bentuk digital berupa angka antara 0 hingga 65535 menggunakan fungsi
read_u16().
-
-
Konversi Nilai Potensiometer ke Sudut Servo:
-
Nilai digital yang dibaca dari potensiometer dimapping menggunakan fungsi
map_value()ke rentang sudut 0-180°. -
Rentang ini sesuai dengan pergerakan servo motor yang digunakan.
-
-
Pengaturan Servo Motor (GP15):
-
Servo motor menerima sinyal PWM dari pin GP15.
-
Nilai sudut yang sudah dikonversi tadi diubah menjadi nilai duty cycle dengan menggunakan fungsi
map_value()lagi. -
Servo motor mengatur posisi berdasarkan nilai duty cycle ini (1500–7500 untuk rentang 0-180°).
-
-
Menampilkan Sudut pada LCD:
-
Nilai sudut servo yang dihitung ditampilkan pada layar LCD I2C 16x2.
-
Informasi ini diupdate secara terus-menerus setiap 200ms untuk mencerminkan perubahan yang dihasilkan oleh potensiometer.
-
Penjelasan Fungsi Tambahan:
-
Fungsi
map_value():
Digunakan untuk mengonversi suatu nilai dari satu rentang ke rentang lainnya, seperti dari rentang 0-65535 (nilai ADC) ke 0-180 (sudut servo) atau dari sudut servo ke duty cycle PWM.
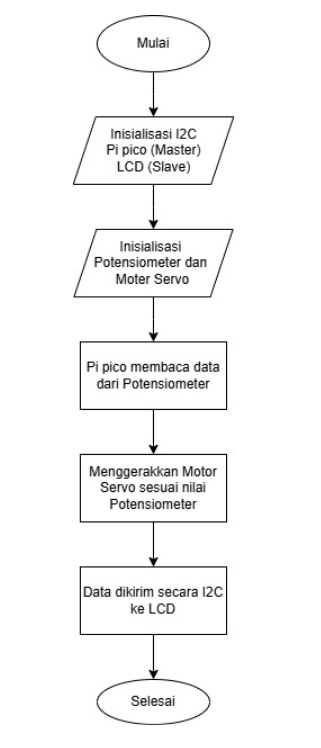
4. Flowchart dan Listing Program[Kembali]
Flowchart
Listing Program
-



Komentar
Posting Komentar