Modul 4
Dapat mengimplementasikan dan menguji sistem sortasi otomatis berdasarkan warna dan berat jeruk.
-
Memahami cara kerja sensor PIR, Load Cell, dan sensor warna dalam proses sortasi otomatis.
-
Dapat merancang dan membuat rangkaian untuk sistem sortasi dengan pengontrol STM32 dan Raspberry Pi Pico.
-
Dapat menampilkan data jumlah jeruk secara real-time pada LCD dengan akurasi yang tinggi.

2. Baterai




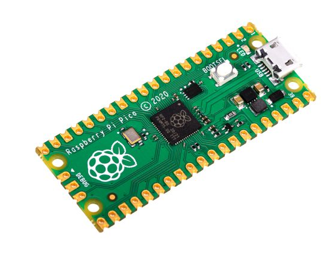
Raspberry Pi Pico adalah papan rangkaian elektronik yang di dalamnya terdapat komponen utama chip mikrokontroler RP2040, yang dirancang dan diproduksi oleh Raspberry Pi Foundatio. Tidak seperti komputer mini raspberry Pi lainnya yang menjalankan sistem operasi seperti Linux, Pico dirancang untuk tugas-tugas yang lebih sederhana dan langsung (embedded system), seperti membaca sensor, mengontrol perangkat, atau melakukan pengolahan data pada tingkat hardware.
Adapun spesifikasi dari Raspberry Pi Pico adalah sebagai berikut:



Features and Specifications :
· Beban Maksimum: 1000 gram (1 Kg)
· Rentang Tegangan Keluaran: 0,1 mV ~ 1,0 mV / V (skala 1:1000 terhadap tegangan masukan, margin kesalahan ≤ 1,5%)
· Impedansi Masukan (Input Impedance): 1066 Ω ±20%
· Impedansi Keluaran (Output Impedance): 1000 Ω ±10%
· Tegangan Masukan Maksimum: 10 Volt DC
· Rentang Suhu Operasional: -20 ~ +65°C
· Material: Aluminium Alloy
· Ukuran: 60 x 12,8 x 12,8 mm
· Berat: 23 gram



Spesifikasi :


- Infra merah : 1,6 V
- Merah : 1,8 V – 2,1 V
- Oranye : 2,2 V
- Kuning : 2,4 V
- Hijau : 2,6 V
- Biru : 3,0 V – 3,5 V
- Putih : 3,0 – 3,6 V
- Ultraviolet : 3,5 V

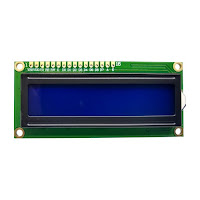
LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan produk-produk elektronik lainnya.
2. Effective display area : 61W x 15.8H mm
3. Character size ( 5 x 7 dots ) : 2.96W X 4.86H mm
4. Character pitch : 3.55 mm
5. Dot size : 0.56W x 0.66H mm
6. Weight : about 35g
- Breadboard

- Jumper Wire

- Power Supply

b. Mikrokontroller:
-STM32F103C8

c. Input:
- Sensor IR (Infra Red)

-Sensor TCS3200
.jpg)

d. Output:
- LCD 16x2
- Motor Servo

PWM (Pulse Width Modulation)
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi.
Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).
Gambar 1. Duty Cycle
· Duty Cycle = tON / ttotal
· tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
· tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low atau 0)
· ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();
PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 * 255 atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.
Gambar 2. Siklus Sinyal PWM pada Arduino
ADC (Analog Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino, menggunakan pin analog input yang diawali dengan kode A (A0- A5 pada Arduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);
KOMUNIKASI
1) Universal Asynchronous Receiver Transmitter (UART)
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.
2) Serial Peripheral Interface (SPI)
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi serial synchrounous kecepatan tinggi yang dimiliki oleh ATmega 328. Komunikasi SPI membutuhkan 3 jalur yaitu MOSI, MISO, dan SCK. Melalui komunikasi ini data dapat saling dikirimkan baik antara mikrokontroller maupun antara mikrokontroller dengan peripheral lain di luar mikrokontroler.
· MOSI : Master Output Slave Input Artinya jika dikonfigurasi sebagai master maka pin MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI sebagai input.
· MISO : Master Input Slave Output Artinya jika dikonfigurasi sebagai master maka pin MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO sebagai output.
· SCLK : Clock Jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input.
· SS/CS : Slave Select/ Chip Select adalah jalur master memilih slave mana yang akan dikirimkan data.
Cara Kerja Komunikasi SPI :
Sinyal clock dialirkan dari master ke slave yang berfungsi untuk sinkronisasi. Master dapat memilih slave mana yang akan dikirimkan data melalui slave select, kemudian data dikirimkan dari master ke slave melalui MOSI. Jika master butuh respon data maka slave akan mentransfer data ke master melalui MISO
3) Inter Integrated Circuit (I2C)
Inter Integrated Circuit atau sering disebut I2C adalah standar komunikasi serial dua arah menggunakan dua saluran yang didisain khusus untuk mengirim maupun menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya.
Cara Kerja Komunikasi I2C :
Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop.
· Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL.
· Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL.
· R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0 = mengirim data ke slave, logika 1 = meminta data dari slave)
· ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah diterima receiver.
INFRARED SENSOR
Sensor Infrared adalah komponen elektronika yang dapat mendeteksi benda ketika cahaya infra merah terhalangi oleh benda. Sensor infared terdiri dari led infrared sebagai pemancar dan fototransistor sebagai penerima cahaya infra merah.
Cara Kerja Sensor Infrared:

Prinsip kerja rangkaian sensor infrared berdasarkan pada gambar 3. Adalah ketika cahaya infra merah diterima oleh fototransistor maka basis fototransistor akan mengubah energi cahaya infra merah menjadi arus listrik sehingga basis akan berubah seperti saklar (swith closed) atau fototransistor akan aktif (low) secara sesaat.

Sensor Loadcell merupakan transduser yang bekerja sebagai konversi dari berat benda menjadi elektrik, perubahan ini terjadi karena terdapat resistansi pada strain gauge. Pada satu sensor loadcell memiliki 4 susunan strain. Sensor ini memiliki nilai konduktansinya berbanding lurus dengan gaya/beban yang diterima dan bersifat resistif. Jika loadcell tidak ada beban besar resistansi nya akan bernilai sama pada setiap sisinya, tetapi ketika loadcell memiliki beban maka nilai resistansinya akan menjadi tidak seimbang. Proses inilah yang dimanfaatkan untuk mengukur berat pada suatu benda.

. Prinsip Kerja Sensor Loadcell

Prinsip kerja load cell ketika mendapat tekanan beban.Ketika bagian lain yang lebih elastic mendapat tekanan, maka pada sisi lain akan mengalami perubahan regangan yang sesuai dengan yang dihasilkan oleh strain gauge, hal ini terjadi karena ada gaya yang seakan melawan pada sisi lainnya. Perubahan nilai resistansi yang diakibatkan oleh perubahan gaya diubah menjadi nilai tegangan oleh rangkaian IC HX711. Dan berat dari objek yang diukur dapat diketahui dengan mengukur besarnya nilai tegangan yang timbul.
Sensor berat atau sensor loadcell memilki prinsip kerja berupa timbangan digital yaitu dengan cara memberikan output pada tegangan dari adanya perubahan pada resistansi yang dihasilkan pada perubahan posisi penyangga beban. Sehingga perubahan itu akan menghasilkan output pada amplifier. (Priskila M.N. Manege, dkk).
Loadcell merupakan komponen utama pada timbangan yang berupa digital. Cara kerja sensor loadcell bila diberikan suatu beban pada inti besi penimbangan maka yang terjadi adalah nilai dari strain gauge dan resistansi akan berubah melalui empat kabel pada komponen sensor loadcell. Yang dimana dua kabel tersebut merupakan eksitasi dan dua kabel sebagai sinyal keluaran yang berfungsi sebagai penghubung ke kontrol (Mirfan).
Loadcell atau yang lebih dikenal dengan sensor berat merupakan alat pendeteksi perubahan pada massa yang dihasilkan oleh nilai suatu benda yang sudah terkena nilai gravitasi dan gaya yang nantinya akan dijadikan suatu sinyal analog yang diteruskan kepada tranduser. Tranduser berfungsi sebagai alat yang mengubah nilai sinyal analog menjadi besaran listrik
Gambar 2.2 Foil Strain Gauge merenggang dan merapat
Pada gambar diatas, apabila adanya tekanan pada sensor loadcell terjadi perubahan pada saat mengalami tekanan akibat beban. Pada gambar 2.3 adalah penjelasan dari polaritas sensor loadcell yang dimana memiliki 4 kutub yaitu kutub positif, kutub negatif, tegangan kabel (Vout +) (Vout -). Kabel berwarna hitam merupakan tegangan V-, kabel berwarna merah merupakan tegangan luaran V+, kabel berwarna putih merupakan Vout- dan kabel berwarna merah merupakan tegangan luaran Vout+.
Cara kerja dari sensor loadcell adalah dengan menggunakan jembatan wheatstone berikut adalah cara kerja dari jembatan wheatstone.

Gambar Rangkaian Jembatan Wheatstone
Jembatan wheatstone memiliki rangkaian yang telah dijelaskan pada gambar diatas dimana nilai dari R1=R3 dan nilai dari R2=R4, yang dimana arus akan mengalir dari sisi nilai R1 untuk mencari nilai pada Va yaitu tagangan pada R1 dan R3 menggunakan rumus

Sedangkan untuk mencari tegangan pada Vb yaitu tegangan pada R2 dan R4 menggunakan rumus

Untuk mencari nilai tegangan dari rangkaian jembatan wheatstone tersebut menggunakan
𝑉𝑜𝑢𝑡 = 𝑉𝑎 −𝑉𝑏
Motor servo adalah jenis motor DC dengan sistem umpan balik tertutup yang terdiri dari sebuah motor DC, serangkaian gear, rangkaian kontrol, dan juga potensiometer. Jadi motor servo sebenarnya tak berdiri sendiri, melainkan didukung oleh komponen-komponen lain yang berada dalam satu paket.
Berikut ini beberapa kelebihan dan kekurangan motor servo.
1. Kelebihan Motor Servo
a. Daya yang dihasilkan sebanding dengan berat atau ukuran motor.
b. Penggunaan arus listrik sebanding dengan beban.
c. Tidak bergetar saat digunakan.
d. Tidak mengeluarkan suara berisik saat dalam kecepatan tinggi.
e. Resolusi dan akurasi dapat diubah dengan mudah.
2. Kekurangan Motor Servo
a. Harga relatif lebih mahal dibanding motor DC lainnya.
b. Bentuknya cukup besar karena satu paket.
Prinsip Kerja Motor Servo
Sebenarnya prinsip kerja dari motor servo tak jauh berbeda dibanding dengan motor DC yang lain. Hanya saja motor ini dapat bekerja searah maupun berlawanan jarum jam. Derajat putaran dari motor servo juga dapat dikontrol dengan mengatur pulsa yang masuk ke dalam motor tersebut.
Motor servo akan bekerja dengan baik bila pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz. Frekuensi tersebut dapat diperoleh ketika kondisi Ton duty cycle berada di angka 1,5 ms. Dalam posisi tersebut rotor dari motor berhenti tepat di tengah-tengah alias sudut nol derajat atau netral.
Pada saat kondisi Ton duty cycle kurang dari angka 1,5 ms, maka rotor akan berputar berlawanan arah jarum jam. Sebaliknya pada saat kondisi Ton duty cycle lebih dari angka 1,5 ms, maka rotor akan berputar searah jarum jam. Berikut ini adalah gambar atau skema pulsa kendali motor servo.
Untuk dapat mengontrol motor servo kita perlu memberikan pulsa high dan pulsa low dengan lebar tertentu. Frekuensi yang diperlukan adalah 50 Hz. Pulsa ini dapat dihasilkan dengan port I/O biasa pada mikrokontroler. Namun terkadang dengan cara ini pergerakan servo menjadi kurang akurat. Oleh karena itu digunakan metode Pulse Width Modulation (PWM). Dengan metode PWM dapat dihasilkan gerakan servo yang cukup akurat dengan resolusi yang kita sesuaikan dengan keinginan kitaBerikut ini adalah salah satu contoh pulsa yang dihasilkan untuk menggerakan servo dengan sudut 0o,90o, dan 180oPulsa ini dapat dihasilkan dari pin OCR pada mikrokontroler. Perlu pengaturan register timer pada mikrokontroler agar dapat dihasilkan pulsa dengan lebar yang sesuai kita inginkan. Hal yang sangat penting adalah pengaturan frekuensi dan lebar pulsa on dan pulsa off. Oleh karena itu perlu dihitung berapa konstanta-konstanta timer yang di atur pada mikrokontroler.MOTOR DC
 Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.LCD (LIQUID CRYSTAL DISPLAY)
LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan produk-produk elektronik lainnya.
Teknologi Display LCD ini memungkinkan produk-produk elektronik dibuat menjadi jauh lebih tipis jika dibanding dengan teknologi Tabung Sinar Katoda (Cathode Ray Tube atau CRT). Jika dibandingkan dengan teknologi CRT, LCD juga jauh lebih hemat dalam mengkonsumsi daya karena LCD bekerja berdasarkan prinsip pemblokiran cahaya sedangkan CRT berdasarkan prinsip pemancaran cahaya. Namun LCD membutuhkan lampu backlight (cahaya latar belakang) sebagai cahaya pendukung karena LCD sendiri tidak memancarkan cahaya. Beberapa jenis backlight yang umum digunakan untuk LCD diantaranya adalah backlight CCFL (Cold cathode fluorescent lamps) dan backlight LED (Light-emitting diodes). Berikut merupakan tabel internal pin connection dari LED:
BATERAI
Baterai (Battery) adalah sebuah alat yang dapat merubah energi kimia yang disimpannya menjadi energi Listrik yang dapat digunakan oleh suatu perangkat Elektronik. Hampir semua perangkat elektronik yang portabel seperti Handphone, Laptop, Senter, ataupun Remote Control menggunakan Baterai sebagai sumber listriknya. Dengan adanya Baterai, kita tidak perlu menyambungkan kabel listrik untuk dapat mengaktifkan perangkat elektronik kita sehingga dapat dengan mudah dibawa kemana-mana. Dalam kehidupan kita sehari-hari, kita dapat menemui dua jenis Baterai yaitu Baterai yang hanya dapat dipakai sekali saja (Single Use) dan Baterai yang dapat di isi ulang (Rechargeable).
Baterai dalam sistem PV mengalami berulang kali siklus pengisian dan pengosongan selama umur pakainya. Siklus hidup (cycle life) baterai adalah banyaknya pengisian dan pengosongan hingga kapasitas baterai turun (melemah) dan tersisa 80% dari kapasitas nominalnya. Pabrik baterai biasanya mencantumkan siklus hidup pada spesifikasi teknis baterai. Mencantumkan satu nilai siklus hidup (cycle life) sebenarnya terlalu menyederhanakan informasi, karena siklus hidup baterai juga tergantung pada suhu baterai.
Dari grafik di atas, terlihat pada suhu operasional baterai yang lebih rendah, siklus hidup baterai lebih lama. Siklus hidup baterai juga tergantung dari DoD, artinya baterai yang dikosongkan hanya 50% dari kapasitasnya, berumur lebih lama jika dikosongkan hingga 80%, namun membuat sistem menjadi lebih mahal, karena membutuhkan kapasitas baterai lebih besar untuk mengakomodasi kebutuhan yang sama.
IC HX711.jpeg)
IC HX711 adalah modul timbangan, yang memiliki prinsip kerja mengkonversi perubahan yang terukur dalam perubahan resistansi dan mengkonversinya ke dalam besaran tegangan melalui rangkaian yang ada. Modul melakukan komunikasi dengan computer/mikrokontroller melalui TTL232.
Spesifikasi Teknis modul HX711 Weight Scale ADC Module:
 Dua kanal ADC (dapat digunakan untuk 2 load cell) dengan keluaran TTL (serial tersinkronisasi, DI dan SCK). Tegangan opersional 5 Volt DC Tegangan masukan diferensial ±40 mV pada skala penuh Akurasi data 24 bit (24-bit ADC) Frekuensi pembacaan (refresh rate) 80 Hz Konsumsi arus kurang dari 10 mA Ukuran: 38 x 21 mm dengan berat 20 gram
Dua kanal ADC (dapat digunakan untuk 2 load cell) dengan keluaran TTL (serial tersinkronisasi, DI dan SCK). Tegangan opersional 5 Volt DC Tegangan masukan diferensial ±40 mV pada skala penuh Akurasi data 24 bit (24-bit ADC) Frekuensi pembacaan (refresh rate) 80 Hz Konsumsi arus kurang dari 10 mA Ukuran: 38 x 21 mm dengan berat 20 gramPrinsip Kerja IC HX711

Prinsip kerja sensor regangan ketika mendapat tekanan beban. (sumber datasheet HX711) Ketika bagian lain yang lebih elastic mendapat tekanan, maka pada sisi lain akan mengalami perubahan regangan yang sesuai dengan yang dihasilkan oleh straingauge, hal ini terjadi karena ada gaya yang seakan melawan pada sisi lainnya. Perubahan nilai resistansi yang diakibatkan oleh perubahan gaya diubah menjadi nilai tegangan oleh rangkaian pengukuran yang ada.
Dan berat dari objek yang diukur dapat diketahui dengan mengukur besarnya nilai tegangan yang timbul.
Prinsip operasi rangkaian strain gauge. (sumber datasheet HX711)
.jpeg)
IC Driver L298N
Modul Driver Motor L298N ini adalah sebuah sebuah H-Bridge Dual Motor Controller 2A yang memungkinkan kita untuk mengatur arah putaran maupun kecepatan dari satu atau dua motor DC. Selain itu, dengan modul driver motor ini kita juga dapat mengontrol sebuah motor DC bipolar dengan mudah.
Modul driver motor ini dapat digunakan untuk motor dengan rentang tegangan DC antara 5 Volt - 35 Volt. Pada modul ini terdapat regulator 5V sehingga jika membutuhkan sumber tegangan 5V kita bisa mendapatkannya dari board ini.
Berikut ini adalah spesifikasi dari Modul Driver Motor L298N:
· Double H-Bridge drive chip: L298N
· Logical voltage: 5V
· Logical current: 0-36 mA
· Drive voltage: 5V sampai dengan 35V
· Drive current: 2A untuk setiap motor DC
· Ukuran: 43x43x27 mm
· Berat: 30 gram
Berikut ini adalah bentuk fisik dari Modul Driver Motor L298N :
IC PCF8574Ekspander input/output (I/O) 8-bit untuk bus dua arah dua arah (I2C) ini dirancang untuk operasi Vcc 2,5-V hingga 6-V.

Perangkat PCF8574 menyediakan ekspansi I/O jarak jauh untuk keperluan umum untuk sebagian besar keluarga mikrokontroler melalui antarmuka I2C [serial clock (SCL), serial data (SDA)].
Perangkat ini dilengkapi port I/O kuasi-dua arah 8-bit (P0-P7), termasuk output terkunci dengan kemampuan penggerak arus tinggi untuk menggerakkan LED secara langsung. Setiap I/O kuasi-dua arah dapat digunakan sebagai input atau output tanpa menggunakan sinyal kontrol arah data. Saat dihidupkan, I/O tinggi. Dalam mode ini, hanya sumber arus ke Vcc yang aktif.
Perangkat PCF8574 adalah ekspander I/O 8-bit untuk bus dua arah dua arah (I2C) yang dirancang untuk operasi Vcc 2,5-V hingga 5,5-V. Ini menyediakan ekspansi I/O jarak jauh untuk tujuan umum untuk sebagian besar keluarga pengontrol mikro melalui antarmuka I2C (jam serial, SCL, dan data serial, SDA, pin).
Perangkat PCF8574 menyediakan output saluran terbuka (INT) yang dapat dihubungkan ke input interupsi mikrokontroler. Interupsi dihasilkan oleh naik atau turunnya tepi input port dalam mode input. Setelah beberapa waktu, tiv, INT valid. Menyetel ulang dan mengaktifkan kembali rangkaian interupsi dicapai ketika data pada port diubah ke pengaturan asli atau data dibaca dari, atau ditulis ke, port yang menghasilkan interupsi. Penyetelan ulang terjadi dalam mode baca pada bit pengakuan setelah tepi naik sinyal SCL, atau dalam mode tulis pada bit pengakuan setelah transisi sinyal SCL tinggi ke rendah. Interupsi yang terjadi selama pulsa clock pengakuan dapat hilang (atau menjadi sangat pendek) karena pengaturan ulang interupsi selama pulsa ini. Setiap perubahan I/O setelah reset dideteksi dan, setelah kenaikan clock berikutnya, ditransmisikan sebagai INT. Membaca dari, atau menulis ke, perangkat lain tidak mempengaruhi rangkaian interupsi. Perangkat ini tidak memiliki konfigurasi internal atau register status. Sebaliknya, baca atau tulis ke I/O perangkat secara langsung setelah mengirimkan alamat perangkat (lihat Gambar 16 dan Gambar 17).
Dengan mengirimkan sinyal interupsi pada saluran ini, I/O jarak jauh dapat menginformasikan mikrokontroler jika ada data masuk pada portnya tanpa harus berkomunikasi melalui bus I²C. Oleh karena itu, PCF8574 dapat tetap menjadi perangkat budak yang sederhana.
Pullup tambahan yang kuat ke Vcc memungkinkan peningkatan tepi yang cepat menjadi output yang banyak muatannya. Perangkat ini menyala ketika output ditulis tinggi dan dimatikan oleh tepi negatif SCL. I/O harus tinggi sebelum digunakan sebagai input.







.jpeg)















.jpeg)

.jpeg)




4. Langkah Langkah Percobaan dan Prinsip Kerja [Kembali]
Prinsip Kerja
Langkah-Langkah Percobaan dan Prinsip Kerja
a. Sensor Infrared (IR Sensor untuk Deteksi Jeruk Awal)
Alat dan Bahan:
Sensor IR
Raspberry Pi Pico
Resistor
Ground
Power Supply
Langkah-Langkah:
Sambungkan sensor IR ke Raspberry Pi Pico:
VCC → 3.3V
OUT → GPIO pin (misal, GP7)
GND → GND
Programkan Raspberry Pi Pico untuk membaca sinyal dari sensor IR.
Uji sensor dengan menempatkan jeruk di depan sensor untuk memastikan mendeteksi objek.
Jika objek terdeteksi, kirim sinyal ke STM32 untuk mengaktifkan Load Cell.
Alat dan Bahan:
Sensor IR
Raspberry Pi Pico
Resistor
Ground
Power Supply
Langkah-Langkah:
Sambungkan sensor IR ke Raspberry Pi Pico:
VCC → 3.3V
OUT → GPIO pin (misal, GP7)
GND → GND
Programkan Raspberry Pi Pico untuk membaca sinyal dari sensor IR.
Uji sensor dengan menempatkan jeruk di depan sensor untuk memastikan mendeteksi objek.
Jika objek terdeteksi, kirim sinyal ke STM32 untuk mengaktifkan Load Cell.
Prinsip Kerja:
Sensor IR mendeteksi keberadaan jeruk melalui pantulan sinar inframerah. Ketika jeruk terdeteksi, sensor mengirimkan sinyal ke Raspberry Pi Pico untuk melanjutkan proses ke pengukuran berat.
Sensor IR mendeteksi keberadaan jeruk melalui pantulan sinar inframerah. Ketika jeruk terdeteksi, sensor mengirimkan sinyal ke Raspberry Pi Pico untuk melanjutkan proses ke pengukuran berat.
b. Load Cell dengan HX711 (Pengukuran Berat Jeruk)
Alat dan Bahan:
Load Cell
Modul HX711
STM32
Servo (Servo 1)
Langkah-Langkah:
Sambungkan Load Cell ke modul HX711:
E+ dan E- untuk eksitasi.
A+ dan A- untuk sinyal.
Sambungkan HX711 ke STM32:
DT → GPIO (misal, A0).
SCK → GPIO (misal, A1).
VCC → 3.3V.
GND → GND.
Programkan STM32 untuk membaca berat dari Load Cell.
Hubungkan servo (Servo 1) ke STM32 (misal, A2).
Uji sistem dengan menimbang jeruk dan pastikan servo bergerak untuk memilah berdasarkan berat.
Alat dan Bahan:
Load Cell
Modul HX711
STM32
Servo (Servo 1)
Langkah-Langkah:
Sambungkan Load Cell ke modul HX711:
E+ dan E- untuk eksitasi.
A+ dan A- untuk sinyal.
Sambungkan HX711 ke STM32:
DT → GPIO (misal, A0).
SCK → GPIO (misal, A1).
VCC → 3.3V.
GND → GND.
Programkan STM32 untuk membaca berat dari Load Cell.
Hubungkan servo (Servo 1) ke STM32 (misal, A2).
Uji sistem dengan menimbang jeruk dan pastikan servo bergerak untuk memilah berdasarkan berat.
Prinsip Kerja:
Load Cell mengukur berat jeruk dan mengirimkan data ke STM32 melalui HX711. STM32 memproses data berat dan menggerakkan Servo 1 untuk memilah jeruk sesuai dengan kriteria berat.
Load Cell mengukur berat jeruk dan mengirimkan data ke STM32 melalui HX711. STM32 memproses data berat dan menggerakkan Servo 1 untuk memilah jeruk sesuai dengan kriteria berat.
c. Sensor Warna (TCS3200 untuk Deteksi Warna)
Alat dan Bahan:
Sensor TCS3200
STM32
Servo (Servo 2)
Langkah-Langkah:
Sambungkan TCS3200 ke STM32:
S0, S1, S2, S3 → GPIO (misal, A3-A6).
OUT → GPIO (misal, A7).
VCC → 3.3V.
GND → GND.
Programkan STM32 untuk membaca nilai RGB dari TCS3200.
Hubungkan servo (Servo 2) ke STM32 (misal, A8).
Uji sistem dengan mendeteksi warna jeruk dan pastikan servo bergerak untuk memilah berdasarkan warna.
Alat dan Bahan:
Sensor TCS3200
STM32
Servo (Servo 2)
Langkah-Langkah:
Sambungkan TCS3200 ke STM32:
S0, S1, S2, S3 → GPIO (misal, A3-A6).
OUT → GPIO (misal, A7).
VCC → 3.3V.
GND → GND.
Programkan STM32 untuk membaca nilai RGB dari TCS3200.
Hubungkan servo (Servo 2) ke STM32 (misal, A8).
Uji sistem dengan mendeteksi warna jeruk dan pastikan servo bergerak untuk memilah berdasarkan warna.
Prinsip Kerja:
Sensor TCS3200 mendeteksi warna jeruk dengan membaca nilai RGB. Data warna diproses oleh STM32, yang kemudian menggerakkan Servo 2 untuk memilah jeruk sesuai warna.
Sensor TCS3200 mendeteksi warna jeruk dengan membaca nilai RGB. Data warna diproses oleh STM32, yang kemudian menggerakkan Servo 2 untuk memilah jeruk sesuai warna.
d. IR Sensor Kedua (Penghitungan Jeruk)
Alat dan Bahan:
Sensor IR
Raspberry Pi Pico
LCD (16x2)
Langkah-Langkah:
Sambungkan sensor IR ke Raspberry Pi Pico untuk mendeteksi jeruk yang telah disortasi.
VCC → 3.3V.
OUT → GPIO pin (misal, GP8).
GND → GND.
Sambungkan LCD ke Raspberry Pi Pico:
SCL → GP15.
SDA → GP14.
Programkan Raspberry Pi Pico untuk menghitung jumlah jeruk yang lewat menggunakan IR sensor kedua.
Tampilkan jumlah jeruk pada LCD secara real-time.
Alat dan Bahan:
Sensor IR
Raspberry Pi Pico
LCD (16x2)
Langkah-Langkah:
Sambungkan sensor IR ke Raspberry Pi Pico untuk mendeteksi jeruk yang telah disortasi.
VCC → 3.3V.
OUT → GPIO pin (misal, GP8).
GND → GND.
Sambungkan LCD ke Raspberry Pi Pico:
SCL → GP15.
SDA → GP14.
Programkan Raspberry Pi Pico untuk menghitung jumlah jeruk yang lewat menggunakan IR sensor kedua.
Tampilkan jumlah jeruk pada LCD secara real-time.
Prinsip Kerja:
Sensor IR kedua mendeteksi jeruk yang lewat dan mengirimkan sinyal ke Raspberry Pi Pico. Data jumlah jeruk kemudian ditampilkan secara real-time pada LCD.
Sensor IR kedua mendeteksi jeruk yang lewat dan mengirimkan sinyal ke Raspberry Pi Pico. Data jumlah jeruk kemudian ditampilkan secara real-time pada LCD.
Kesimpulan
Dengan integrasi dari sensor IR, Load Cell, TCS3200, dan motor servo, sistem ini mampu:
Mendeteksi keberadaan jeruk.
Memilah jeruk berdasarkan berat dan warna.
Menghitung jumlah jeruk yang telah disortasi dan menampilkannya pada LCD.
Dengan integrasi dari sensor IR, Load Cell, TCS3200, dan motor servo, sistem ini mampu:
Mendeteksi keberadaan jeruk.
Memilah jeruk berdasarkan berat dan warna.
Menghitung jumlah jeruk yang telah disortasi dan menampilkannya pada LCD.
UART (Komunikasi Antara Raspberry Pi Pico dan STM32)
Alat dan Bahan:
Raspberry Pi Pico
STM32
Kabel jumper (untuk koneksi serial)
Ground bersama
Alat dan Bahan:
Raspberry Pi Pico
STM32
Kabel jumper (untuk koneksi serial)
Ground bersama
Langkah-Langkah Koneksi UART:
Hubungkan Pin UART:
Raspberry Pi Pico (UART TX - GP8) → STM32 (UART RX - PA10)
Raspberry Pi Pico (UART RX - GP9) → STM32 (UART TX - PA9)
Raspberry Pi Pico (GND) → STM32 (GND)
Konfigurasi UART pada Raspberry Pi Pico:
Raspberry Pi Pico bertindak sebagai pengirim data ke STM32 untuk menjalankan fungsi tertentu.
Data dikirimkan melalui TX (GP8).
Konfigurasi UART pada STM32:
STM32 membaca data dari RX (PA10) yang dikirim oleh Raspberry Pi Pico.
STM32 juga dapat mengirimkan data balik ke Raspberry Pi Pico melalui TX (PA9).
Sinkronisasi Ground:
Pastikan kedua perangkat memiliki ground yang sama agar komunikasi UART berjalan stabil.
Hubungkan Pin UART:
Raspberry Pi Pico (UART TX - GP8) → STM32 (UART RX - PA10)
Raspberry Pi Pico (UART RX - GP9) → STM32 (UART TX - PA9)
Raspberry Pi Pico (GND) → STM32 (GND)
Konfigurasi UART pada Raspberry Pi Pico:
Raspberry Pi Pico bertindak sebagai pengirim data ke STM32 untuk menjalankan fungsi tertentu.
Data dikirimkan melalui TX (GP8).
Konfigurasi UART pada STM32:
STM32 membaca data dari RX (PA10) yang dikirim oleh Raspberry Pi Pico.
STM32 juga dapat mengirimkan data balik ke Raspberry Pi Pico melalui TX (PA9).
Sinkronisasi Ground:
Pastikan kedua perangkat memiliki ground yang sama agar komunikasi UART berjalan stabil.
Prinsip Kerja UART dalam Sistem:
Proses Pengiriman Data:
Raspberry Pi Pico mengirimkan data berupa sinyal hasil deteksi IR kedua (misalnya, jumlah jeruk yang telah dihitung) ke STM32. STM32 memproses data tersebut untuk logika kontrol servo berdasarkan berat dan warna jeruk.
Proses Penerimaan Data:
STM32 mengirimkan kembali status sistem (misalnya, data hasil sortasi berat dan warna) ke Raspberry Pi Pico untuk ditampilkan pada LCD.
- Listing Program
1. UART Pi Pico
from machine import Pin, UARTimport timefrom hx711 import HX711
# UART setupuart = UART(0, baudrate=9600, tx=Pin(8), rx=Pin(9))
# HX711 setuphx = HX711(d_out=Pin(14), pd_sck=Pin(15))hx.zero() # Set nol
# Threshold berat (dalam gram)threshold = 100
# Simulasi warna dari TCS3200# (kamu bisa ganti nanti dengan deteksi warna asli)def deteksi_warna(): # return "merah", "kuning", "biru", dll return "kuning"
while True: # Deteksi berat berat = hx.read() print("Berat:", berat)
if berat > threshold: uart.write("servo1\n") # Load cell aktif print("Kirim: servo1") time.sleep(1)
# Deteksi warna warna = deteksi_warna() print("Warna:", warna)
if warna == "kuning": uart.write("servo2\n") # TCS aktif print("Kirim: servo2") time.sleep(1)
time.sleep(0.5)
2. STM32
from machine import Pin, UARTfrom hx711 import HX711 # Pastikan kamu sudah punya hx711.pyimport time
# UART setup (TX: GP8, RX: GP9)uart = UART(0, baudrate=9600, tx=Pin(8), rx=Pin(9))
# Load Cell HX711 setup (DT: GP14, SCK: GP15)hx = HX711(d_out=Pin(14), pd_sck=Pin(15))hx.tare() # Kalibrasi awal (tanpa beban)
# TCS3200: input dari pin OUTwarna_pin = Pin(16, Pin.IN)
# Fungsi deteksi warna kuningdef warna_kuning(r, g, b): return r > 250 and g > 200 and b < 200
# Fungsi dummy baca RGB (ganti dengan pembacaan real dari TCS3200 jika tersedia)def baca_rgb_dummy(): # Simulasikan hasil warna kuning return (303, 261, 159)
# Ambang berat (gram)AMBANG_BERAT = 200 # atur sesuai hasil kalibrasi
while True: # Baca warna r, g, b = baca_rgb_dummy() print("RGB:", r, g, b)
if warna_kuning(r, g, b): uart.write("servo2\n") print("Kuning terdeteksi → servo2")
# Baca berat try: berat = hx.get_units(5) print("Berat:", berat, "gram")
if berat > AMBANG_BERAT: uart.write("servo1\n") print("Berat terdeteksi → servo1") except Exception as e: print("Error HX711:", e)
time.sleep(1)
Video Menjalankan Rangkaian
Proses Pengiriman Data:
Raspberry Pi Pico mengirimkan data berupa sinyal hasil deteksi IR kedua (misalnya, jumlah jeruk yang telah dihitung) ke STM32. STM32 memproses data tersebut untuk logika kontrol servo berdasarkan berat dan warna jeruk.Proses Penerimaan Data:
STM32 mengirimkan kembali status sistem (misalnya, data hasil sortasi berat dan warna) ke Raspberry Pi Pico untuk ditampilkan pada LCD.
- Listing Program
1. UART Pi Pico
Download datasheet IR sensor [klik]
Download datasheet LDR (sensor cahaya) [klik]
Download sensor garis (IR) [klik]
Download sensor LDR [klik]
Download sensor jarak [klik]
Download Datasheet Sensor Load Cell 1 Kg klik disini
Download Datasheet Modul HX711 klik disini



{kind=link}
{kind=link}
{kind=link}
Komentar
Posting Komentar